Separation of Concerns in Cross-Compilation

Managing complex C++ projects across multiple platforms often ends up being a frustrating and time-consuming task. However, this common challenge faced also by the most experienced software developers doesn’t have to be an inevitable struggle. Imagine a world where cross-compilation is not just feasible, but also efficient and less cumbersome. I have noticed in several past friendly discussions with other engineers that many are not at all familiar with the type of Separation of Concerns that Nix didn’t invent but also uses.
The earlier article C++ with Nix in 2023, Part 2: Package Generation and
Cross-Compilation
concentrated more on the creation of a new package from scratch and explaining
mkDerivation etc., while in this article, we’re going to look from a little
bit higher level at how cross-compilation is handled so elegantly in Nix, that
it can improve overall project health and development pace and at the same time
reduce costs.
What makes Cross-Compilation Hard?
Cross-compilation should in general not be hard: We just need a compiler whose backend generates code for the target architecture and let it link the compiled code against libraries that are also compiled for that target architecture.
So why does it turn out to be hard whenever it’s being done for huge real-life projects?
It typically goes downhill in steps that have less to do with cross-compilation itself but more with managing dependencies:
- Product: We assume a project that is already huge and has a complicated build system
- Cross-compiler: We need one
- External libraries: We need cross-compiled variants of them
- Distribution: If we use shared libraries, we will need to provide a way to package those along with the app. Alternatively, we use static linking to get one big binary that’s easier to distribute.
The steps are then:
- The cross-compiler is now obtained in one of two ways:
- A.) Someone creates a compiler bootstrap script that aims to be Linux-distro independent. This script will go into a Dockerfile or right into the build system.
- B.) A cross-compiler package is used. As this ties the project to a certain package distribution, we are now forced to this distro or use Docker.
- The package manager doesn’t let us install native and foreign-target libraries on the same system. And developers also use different package managers. So we typically end up building external libraries for the target platform ourselves: a. These go into the same Docker image. b. Or the project build system also builds them for us.
- As we do not have package distribution infrastructure, we typically go the static building route and end up also fiddling static linkage into our project build system.
The result is then one of these two:
- A.) A huge, complicated, monolithic build system that manages not only the build
of our actual project, but also the build of the compiler and all the
libraries.
- It’s painful to set up and the code takes forever to compile.
- Only senior developers are allowed to touch the fragile parts.
- Complicated upgrading.
- B.) A Docker image that nicely abstracts the parts away that are different from
normal non-cross-compilation.
- Also difficult upgrades.
Variant B seems to be the cleanest, but a clean execution of it seems to be rare in the industry. At least in my experience, development teams end up creating a huge pile of complexity in the form of Variant A.
Especially in combination with static linking, developers often decide that the build system should only build static binaries, because maintaining both dynamic and static linking at the same time makes the build system too complex.
CMake and meson can generally both be used correctly to keep the project description agnostic of the linking method and then simply select the method with command line parameters. However, I have not seen many big commercial real-life projects where this was still possible without much hassle.
I often asked myself “Why do these build systems do everything completely differently than suggested in the official documentation and tutorials of the build systems?” With my experience of today, I think the answer is simple:
Separation of Concerns.
Build systems are not designed to manage dependencies. Not knowing it better, developers try to do it anyway. The result is hard to change, extend, maintain, and upgrade.
As promised in the introduction, we will have a look at how Nix makes it easy to change this for the better.
The Example App
Let’s build an example app that depends on OpenSSL and Boost at run-time. It simply reads a character stream from standard input and uses OpenSSL to calculate the SHA256 hash. We use the boost dependency to stop the time - the C++ STL could have done that for us, too, but then we wouldn’t have another nice dependency on a huge external lib.
The program is roughly 60 LOC short/long. I uploaded the code to this GitHub repository: https://github.com/tfc/cpp-cross-compilation-example
Let’s call this app minisha256sum and write a
CMakeLists.txt file for it:
cmake_minimum_required(VERSION 3.27)
project(minisha256sum)
find_package(OpenSSL REQUIRED)
find_package(Boost REQUIRED COMPONENTS chrono)
add_executable(minisha256sum src/main.cpp)
target_link_libraries(minisha256sum Boost::chrono OpenSSL::SSL)
set_property(TARGET minisha256sum PROPERTY CXX_STANDARD 20)
install(TARGETS minisha256sum DESTINATION bin)CMake provides good standard facilities for finding external libraries. This way, the build system may remain simple (it still looks relatively noisy compared to other language ecosystems because that’s how C++ build systems look like).
This project can now be built via the typical CMake dance:
$ mkdir build
$ cd build
$ cmake ..
$ cmake --build .Let’s check if it works:
$ ./minisha256sum < src/main.cpp
cb8829956b86a05cd4bf374e95f4ae3928644f4b79cef82ef89529c2ef65f004 0 milliseconds
$ sha256sum < src/main.cpp
cb8829956b86a05cd4bf374e95f4ae3928644f4b79cef82ef89529c2ef65f004 -It provides the same hash as the
sha256sum app from GNU coreutils,
which should be good enough.
The app is not really optimized but that will not be a matter for the rest of
this article.
Packaging it with Nix
To get a nice nix build and nix run workflow, we need to provide a few nix
expressions.
Let’s start with a package.nix that already reflects our dependency structure:
# file: package.nix
{ stdenv, lib, cmake, boost, openssl }:
stdenv.mkDerivation {
name = "minisha256sum";
src = lib.fileset.toSource {
root = ./.;
fileset = lib.fileset.unions [
./src
./CMakeLists.txt
];
};
nativeBuildInputs = [ cmake ];
buildInputs = [ boost openssl ];
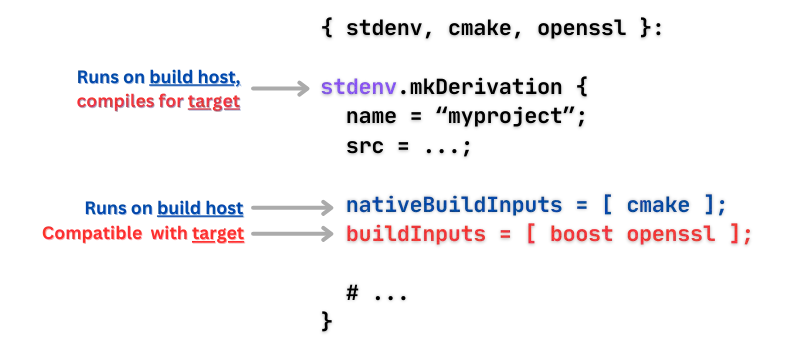
}When cross-compiling this application, we need:
- A compiler that runs on the build host but compiles for the target
- CMake which runs on the host
- Boost and OpenSSL, but built for the target
nativeBuildInputs means “compile-time dependency on the building host” and
buildInputs means “run-time dependency on the target”.
The nixpkgs documentation describes this in more detail.
To create a buildable, installable, and runnable package from this expression,
we need to apply the callPackage function which is a
well-known pattern in the Nix sphere:
It automatically fills out all the function parameters from what’s available in
pkgs that we can see in the first line of package.nix, which happen to be
our dependencies.
minisha256sum = pkgs.callPackage ./package.nix { }In the project’s flake.nix file, we
make this call in this line.
With this in place, we can now run it without handling the build commands
manually (I’m not hiding code here: mkDerivation generally knows how to build
CMake projects when CMake was mentioned as a dependency).
After pushing it to a repository, we can even do this from a different computer
without cloning the repo first:
$ nix build github:tfc/cpp-cross-compilation-example
$ file result/bin/minisha256sum
result/bin/minisha256sum:
ELF 64-bit LSB executable, x86-64, version 1 (GNU/Linux), dynamically linked,
interpreter /nix/store/7jiqcrg061xi5clniy7z5pvkc4jiaqav-glibc-2.38-27/lib/ld-linux-x86-64.so.2,
for GNU/Linux 3.10.0, not stripped
# Run directly over via `nix run` without building it first:
$ result/bin/minisha256sym < ~/some-file.zip
f7cb5ade7906f364a0d4d11478a4b9f25c86d0b3381a5b3907e2c49b31a00fee 3 milliseconds
$ nix run github:tfc/cpp-cross-compilation-example < ~/some-file.zip
f7cb5ade7906f364a0d4d11478a4b9f25c86d0b3381a5b3907e2c49b31a00fee 3 millisecondsCross-Compilation
This is a quick one:
Assuming, we’re on a 64bit Intel PC, we can create multiple static/dynamic cross-compiled packages like this:
static = pkgs.pkgsStatic.callPackage ./package.nix { };
aarch64 = pkgs.pkgsCross.aarch64-multiplatform.callPackage ./package.nix { };
aarch64-static = pkgs.pkgsCross.aarch64-multiplatform.pkgsStatic.callPackage ./package.nix { };The attributes pkgs.pkgsStatic and pkgs.pkgsCross.aarch64-multiplatform
contain their own version of callPackage, but they come with the whole pkgs
package list adapted for the selected target platform.
There’s also pkgs.pkgsCross.mingwW64, which compiles binaries for
Microsoft Windows using the
minimalist GNU environment for Windows mingw.
Whenever we use one of those specialized callPackage implementations to call
our package.nix function, this happens:
Because we structurally split the dependencies between compile-time dependencies
and run-time dependencies, the cross-callPackage function can now fill the
package dependencies with the right versions of each.
This way, the build system does not need to be educated a lot about what happens: Nix creates the correct build environment for the given package variant (similar to the approach with the clean Docker image, but only with exactly the needed dependencies and with less overhead for defining it), the build system simply uses the given compiler and locates the given dependencies via CMake/meson-specific environment variables (that have been set by Nix), and builds the project. (It also works with build system combinations like GNU Automake/Autoconf and GNUMake and others)
I tested this example with the following combinations:
| From/To | x86_64-linux | aarch64-linux | x86_64-darwin | aarch64-darwin | x86_64-w64-mingw32 |
|---|---|---|---|---|---|
x86_64-linux | ✅ | ✅ | ❌ | ❌ | ✅ |
aarch64-linux | ✅ | ✅ | ❌ | ❌ | ✅ |
x86_64-darwin | ✅ | ✅ | ✅ | ❌ | ✅ |
aarch64-darwin | ✅ | ✅ | ✅ | ✅ | ✅ |
Interestingly, if we “cross-compile” from the same architecture to the same
architecture on Linux, we get exactly the same package like for the native
pkgs.callPackage version, so Nix doesn’t even bother to rebuild it.
The symbol ✅ includes static/dynamic linkage in all cases but not for Windows.
The entries with the ❌ symbol in the table are not implemented in the Nixpkgs repository. This could be done if needed. Typically, companies either implement functionality and upstream it or provide funding to make it happen.
Summary
The demonstrated trick shows that we effectively separated the Dependency Management from the Build System. Many developers I talked to about this have never thought about this separation. The reason might be simple: Because it’s not easy to implement without a good technology for dependency management. I feel like Docker has more of a place in deployment than in development.
The advantages of this separation are huge:
- A simpler build system that is easy to extend even for non-seniors
- Free choice between dynamic and static linking per build system parameter
- Wide support for compiling from/to different host architectures and operating systems
- Not managing compiler, deps, and project in one build system makes everything
modular:
- Less work with updates
- Faster setup time per developer
- Cacheable dependencies
- Easier reuse of individual modules in other projects
We only built binaries this time, no
container images,
systemd-nspawn images, VMs, or disk images.
This is however simple to add on top.
If you want to evaluate Nix or even use it in your real projects, don’t hesitate to give us a call! We have a lot of experience, especially with low-level C++ projects. Contact us and see how the complexity of your projects can be simplified.
